
Haptics capabilities are embedded in smartphones and game controllers, and their use is expanding into robotic controls, automobile consoles, and more; the physical actuator and its driver are the key hardware elements.
Haptics-enhanced devices are all around us, even if we don’t consciously realize it. The smartphone has different vibrations depending on who is calling or messaging, the game controller that shakes and rattles in sync with the game action, or the tangible feedback you get when using a touchscreen. In essence, these are all manifestations of haptics-assisted applications. Now, haptics uses are part of virtual/augmented reality (VR/AR), expanding to automobile consoles, wearables, user interfaces for touch-sensitive robotics, and more.
So what is haptics, presumably derived from the ancient Greek word ἁπτικός (haptikos, “able to come in contact with”)? As with many technical developments, the definition depends on your perspective and the context, but the Mirriam-Webster dictionary definition is a good place to start, defining it as “the use of electronically or mechanically generated movement that a user experiences through the sense of touch as part of an interface.”
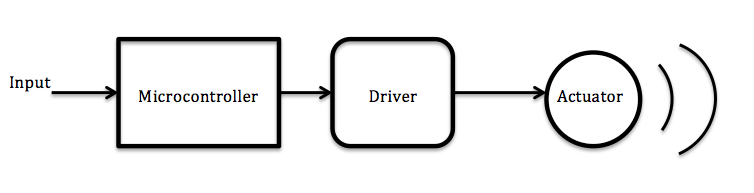
Three things are required to embed haptics within a product, device, or user interface: the electromechanical actuator, which translates electrical signals into physical motion; the electronic driver (usually an IC but sometimes just a single transistor), which provides the voltage and current for the actuator; and software (or firmware) driver usually embedded in a microcontroller which tells the electronic driver the specific voltage/current pattern to provide to the actuator (Figure 1.
The first part of this article will focus on the various ways to build an actuator and its performance attributes, while the second part will look at some electronic drivers. Note that the widely used term “driver” has two different meanings: one is the physical circuit that acts as the intermediary between the low-level electronics and the load, and the other is the software module that provides the needed drive-waveform algorithms. This nomenclature overlap is ingrained in the system and is just the way it is.
Haptics actuator options
There are three types of haptics actuators in use. The linear resonant actuator (LRA) and the eccentric rotating mass actuator (usually referred to as an ERM) are the most common. A piezoelectric actuator is less used relative to the LRA and ERM—but that may change.
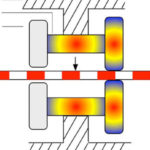
The linear resonant actuator
As its name indicates, this actuator’s key operating principle is self-resonance driven by an arrangement similar to a voice-coil loudspeaker. The mechanism has a spring-mounted mass, which is induced to vibrate in a linear motion by a fixed voice coil interacting with a permanent magnet (Figure 2). The mass is also attached to a spring, which returns it to the neutral position.
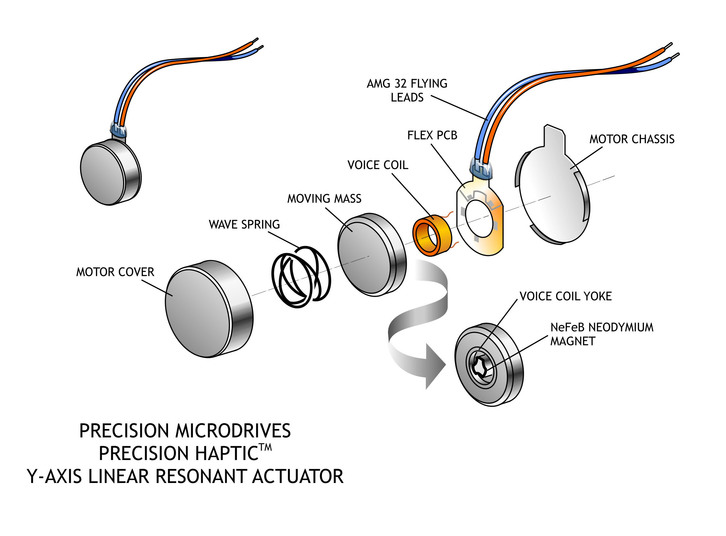
An AC waveform drives the magnetic mass up and down, causing displacement of the LRA mass and, thereby, the vibration force. The LRA is most efficient when driven at the resonant frequency, but as with any loudspeaker, it can provide a range of different frequencies and thus haptic effects even when driven off-resonance. The LRA has a start-up time, typically from 40 to 60 milliseconds, but a stop time on the order of several hundred milliseconds, which can be reduced by using a “braking” drive signal, which is 180⁰ out of phase.
The eccentric rotating mass actuator
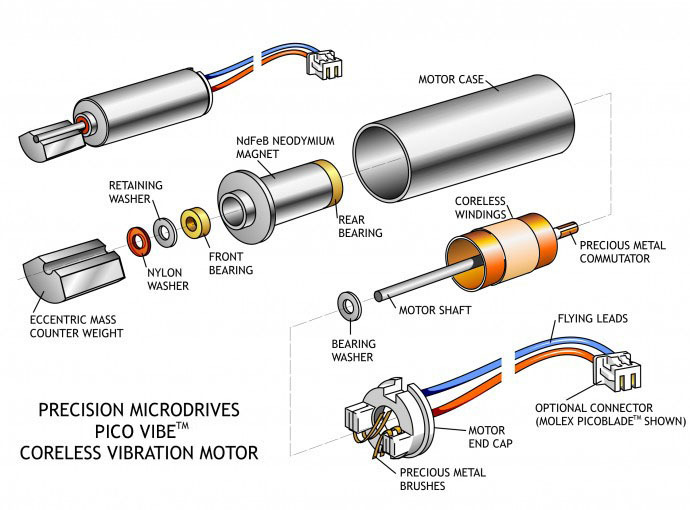
The core of the ERM is a small motor with an off-center load and driven by a differential plus/minus DC voltage (Figure 3. As it starts to spin, the entire assembly vibrates due to that eccentric mass and the effect of centripetal force. (There’s some irony here, as motor designers and fabricators usually devote extra effort to balance the motor as perfectly as possible so that it doesn’t vibrate!). Reversing the drive voltage acts to brake the motor. The ERM DC motors are tiny, with a diameter of up to about 6 mm (although some are slightly larger). They normally operate from a 1.5-V to 3-V supply, compatible with one or two batteries.
The ERM is limited to basic vibration operation and unsuited for more complicated haptics motions and effects. As a motor, it consumes significant power and needs more power to spin faster and induce larger vibrations. The input voltage controls the speed of the motor, which in turn affects both the vibration amplitude and the vibration frequency.
Due to its inherent inertia—a consequence of the eccentric mass—it takes a defined amount of time to “rev up” to the desired rotational speed. The rise time to 90% of the target value is on the order of 5o to 100 milliseconds, as is the fall time to stop. This latency means that the ECM is not a good fit for fast-repeated haptics effects such as those of gaming.
ERMs are noisy and have a distinct buzz. This is not a problem in a louder application (again, gaming). But it is contrary to the “silent” annunciator mode that many haptics applications require, such as letting someone in a conference meeting, wedding, funeral, or similar decorum event know their phone is ringing or they are receiving a text message.
In general, the ERM consumes more power, is inherently less efficient than an LRA, and is less versatile. However, some applications do not need the versatility, and the duty cycle/usage rate is quite low, so the lower cost for the ERM makes it a better overall choice for those situations.
The piezoelectric actuator
The actuator is less well-known or used than the LRA or ERM devices, mainly due to the driving challenges. However, that may be changing, as discussed in the next part. It is based on the well-known, widely used piezoelectric effect. The piezo actuator can be built as a stack of piezo elements but is more commonly constructed as a cantilevered “bender,” which offers more displacement but less force (Figure 4). When a high-voltage signal is applied, the beam bends, creating the desired motion at the tip of the beam.

Piezo-based actuators have fast start-up and response time on the order of one millisecond, wide bandwidth, low audible noise, and high vibration strength. Also, the actuator’s deflection is directly proportional to the imposed signal, so it can take a position and hold it or be instructed to vibrate. Unlike the ERM and LRA actuators, the position, amplitude, and frequency of the deflection can be independently controlled.
The primary downside to the piezo-based device is its higher voltage-drive requirement, which reaches the high tens and even hundreds of volts, depending on the number of layers of a piezo device. Conversely, it requires less overall power (voltage times current). So there’s a tradeoff: lower power consumption but higher voltages, which are often difficult to develop, especially in a small, battery-powered device.
Haptics actuator parameters: As with any component, there are key parameters vendors use to characterize and engineers use to judge performance and tradeoffs. For haptics actuators, in addition to size, weight, and cost, these include driving voltage, power requirements, acceleration amplitude displacement amplitude, and peak frequency. These vary by basic haptics-actuator type and between individual models of a given type.
The second part of this article looks at standard available driver comments for the different haptics actuators.
Related EE World Online Content
- FAQ: Piezoelectric motors, Part 1: actuators
- FAQ: Piezoelectric motors, Part 2: drive circuits
- World’s First Mechanically Customizable Haptics in TacHammer Developer Kit
- Haptics driver IC powers eccentric rotating mass, linear resonant actuator motors
- The Tinker’s Toolbox – Eric Siegel of TI on Haptics Feedback in Touch-Enabled Devices
- Desktop Development Kit enables textures/haptic effects defined by software
- Flexible roll-to-roll actuators work like piezoelectrics, include high-voltage drivers
- Designing and manufacturing haptic sensors for robotic surgery platforms
- How Soundscapes And Vibrations Are Helping Blind People See The World
- Engineers Developing Advanced Robotic Systems That Will Become Surgeon’s Right Hand
References
- Boréas Technologies, “Here’s Why Piezo Should Be The Most Used Haptic Technology”
- Boréas Technologies, “BOS1901 Piezo Haptic Driver”
- Michigan State University, Michael Greene, ECE480: Design Team 4 Application Note, “Haptic Feedback
- Technology”
- com/Mide Technology, “Haptic Actuators: Comparing Piezo to ERM and LRA”
- Precision Microdrives, “AB-020 : Understanding Linear Resonant Actuator Characteristics”
- Precision Microdrives, “Eccentric Rotating Mass Vibration Motors – ERMs”
- Precision Microdrives, “AB-028 : Vibration Motor Comparison Guide”
- Sparkfun Electronics, “Haptic Motor Driver Hook-Up Guide”
- Texas Instruments, SSZB151, “Haptics Solutions for ERM and LRA Actuators”
- Texas Instruments, SLYT483, “High-definition haptics: Feel the difference!”
- Texas Instruments. DRV2603 Data Sheet
- Texas Instruments, DRV8862 Data Sheet

Leave a Reply